பாத முக்கோணம்
பாத முக்கோணம் (pedal triangle) என்பது ஒரு முக்கோணத்தின் மூன்று பக்கங்களின் மீது ஒரு புள்ளியை வீழ்த்துவதன் மூலம் பெறப்படுகிறது.
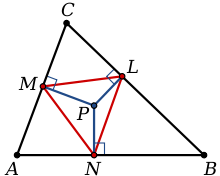
முக்கோணம் ABC இன் பக்கங்களின் மீது P என்ற புள்ளியை வீழ்த்தும்போது, அதாவது P லிருந்து முக்கோணத்தின் ஒவ்வொரு பக்கத்திற்கும் செங்குத்துகள் வரையப்படும்பொழுது, அச்செங்குத்துகளின் அடிப்புள்ளிள் L, M, N எனில், இம்மூன்று புள்ளிகளையும் இணைத்து வரையப்படும் முக்கோணம் LMN பாத முக்கோணம் ஆகும்.
P புள்ளியைப் பொறுத்து பாத முக்கோணம் ABC முக்கோணத்தின் சில சிறப்புவகை முக்கோணங்களாகவும் அமையும்:
- P = செங்கோட்டுச்சந்தி எனில், LMN = ஆர்த்திக் முக்கோணம்.
- P = உள்வட்டமையம் எனில், LMN = உள்தொடு முக்கோணம்
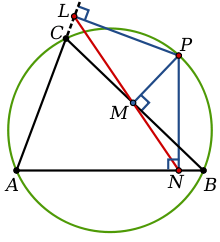
- ABC முக்கோணத்தின் சுற்றுவட்டத்தின்மீது புள்ளி P அமையும்பொழுது பாத முக்கோணம் ஒரு கோடாகி விடுகிறது. இக்கோடு பாதக் கோடு (pedal line) என்றும் சில சமயங்களில் கணிதவியலாளர் ராபர்ட் சிம்சனின் பெயரால் சிம்சன் கோடு (Simson line) எனவும் அழைக்கப்படுகிறது.
மூல முக்கோணத்தின் உட்புறமாக அமையும் புள்ளி P இன் பாத முக்கோணத்தின் உச்சிகள் மூல முக்கோணத்தின் பக்கங்களைக் கீழே தரப்பட்டுள்ள முடிவை நிறைவு செய்யும் விதமாகப் பிரிக்கின்றன.[1]:85-86

முந்நேரியல் ஆட்கூறுகள்
புள்ளி P இன் முந்நேரியல் ஆட்கூறுகள் p : q : r எனில், பாத முக்கோணத்தின் உச்சிகள் L, M, N இன் முந்நேரியல் ஆட்கூறுகள்:
- L = 0 : q + p cos C : r + p cos B
- M = p + q cos C : 0 : r + q cos A
- N = p + r cos B : q + r cos A : 0
எதிர்பாத முக்கோணம்
மூல முக்கோணம் ABC இன் உச்சிகளையும் புள்ளி P ஐயும் இணைக்கும் கோட்டுத்துண்டுகள் AP, BP, CP. இம்மூன்று கோட்டுத்துண்டுகள் ஒவ்வொன்றுக்கும் P லிருந்து வரையப்படும் செங்குத்துக்கோடுகள் மூன்றும் இரண்டிரண்டாக வெட்டிக்கொள்ளும் புள்ளிகள் (L ' M ' N ') மூன்றையும் இணைத்து வரையப்படும் முக்கோணமே P இன் எதிர்பாத முக்கோணம் ஆகும்.
எதிர்பாத முக்கோணத்தின் உச்சிகளின் முந்நேரியல் ஆட்கூறுகள்:
- L' = − (q + p cos C)(r + p cos B) : (r + p cos B)(p + q cos C) : (q + p cos C)(p + r cos B)
- M' = (r + q cos A)(q + p cos C) : − (r + q cos A)(p + q cos C) : (p + q cos C)(q + r cos A)
- N' = (q + r cos A)(r + p cos B) : (p + r cos B)(r + q cos A) : − (p + r cos B)(q + r cos A)
எடுத்துக்காட்டு:
ஒரு முக்கோணத்தின்மூன்று வெளிவட்டமையங்களாலான முக்கோணமானது அந்த மூல முக்கோணத்தின் உள்வட்ட மையத்தின் எதிர்பாத முக்கோணமாக இருக்கும்.
முக்கோணத்தின் மூன்று பக்கங்கள் BC, CA, AB,க்களின்இன் நீட்டிப்புகளின் மீது புள்ளி P அமையாதநிலையில், P இன் சமகோண இணையியப் புள்ளி P−1 ஆக இருந்தால்,, P இன் பாத முக்கோணமானது P−1 இன் எதிர்பாத முக்கோணத்துடன் ஒத்தநிலை கொண்டதாயிருக்கும். ஒத்தநிலை மையத்தின் முந்நேரியல் ஆட்கூறுகள்:
- ap(p + q cos C)(p + r cos B) : bq(q + r cos A)(q + p cos C) : cr(r + p cos B)(r + q cos A).
P ஒரு முக்கோண மையமாக "இருந்தால், இருந்தால் மட்டுமே" இந்த ஒத்தநிலை மையமும் ஒரு முக்கோண மையமாக இருக்கும்.
P இன் பாத முக்கோணம் மற்றும் P−1 இன் எதிர்பாத முக்கோணங்களின் பரப்பளவுகளின் பெருக்குத்தொகையானது மூல முக்கோணமான முக்கோணம் ABC இன் பரப்பளவின் வர்க்கத்திற்குச் சமமாக இருக்கும்..
மேற்கோள்கள்
- Alfred S. Posamentier and Charles T. Salkind, Challenging Problems in Geometry, Dover Publishing Co., second revised edition, 1996.